Publikationen und Forschungsarbeit
Hier finden Sie einen Überblick über die Publikationen und Forschungsarbeit der Rhineland Mechatronics Academy.
Hier finden Sie einen Überblick über die Publikationen und Forschungsarbeit der Rhineland Mechatronics Academy.
Advanced driver assistance systems are an important step on the way towards the autonomous driving. However, there are new challenges in the release of increasingly complex systems. For the testing of those systems many test kilometers are necessary to represent sufficient diversity. Hence, the virtual testing of driver assistance systems brings new opportunities.

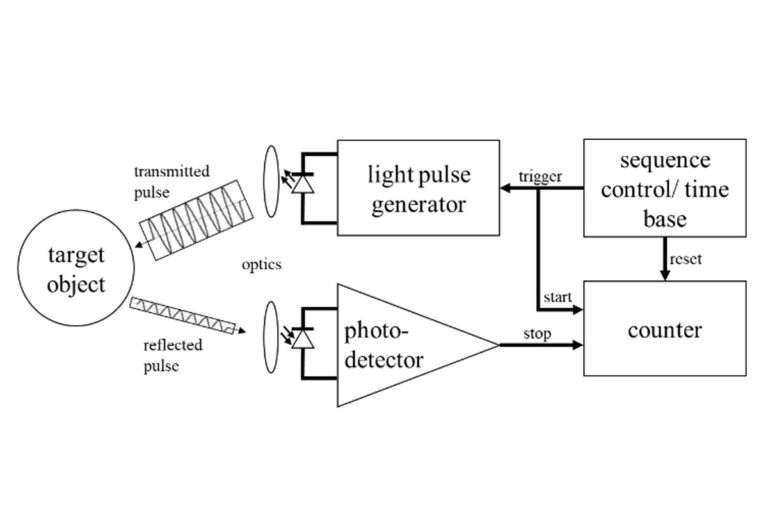
New approaches for testing of autonomous driving functions are using Virtual Reality (VR) to analyze the behavior of automated vehicles in various scenarios. The real time simulation of the environment sensors is still a challenge. In this paper, the conception, development and validation of an automotive radar raw data sensor model is shown.

Recently, virtual realities and simulations play important roles in the development of urban traffic infrastructure. By an appropriate abstraction, they help to design, investigate and communicate inner-city development processes. Especially, to investigate interactions between infrastructure and future mobility participants, a valid virtual model is essential for functionality and reliability.

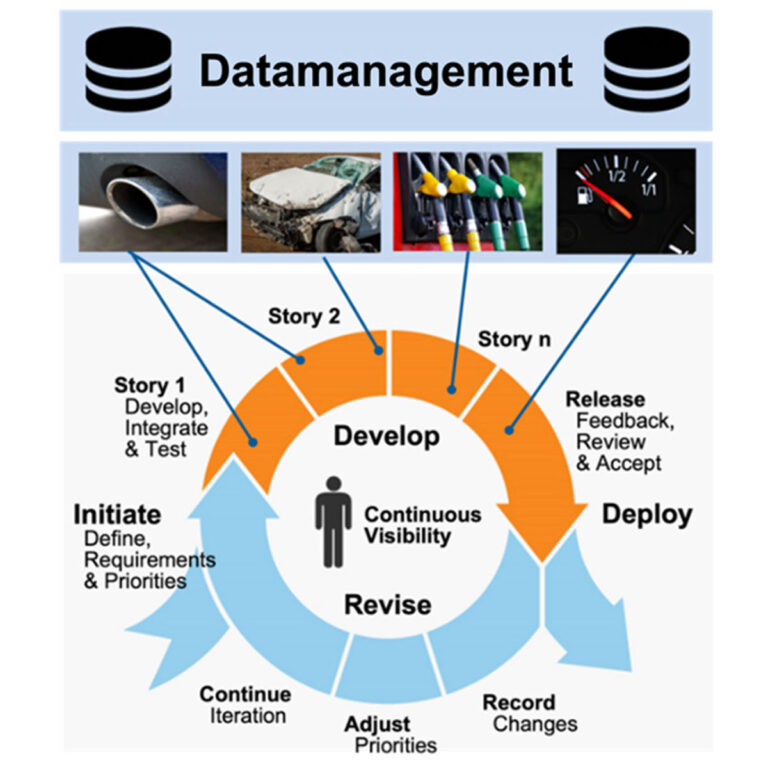
For many years now, models for representing reality have played a decisive role in the development of control systems. By appropriate abstraction they help to design an efficient development process. Especially in the development of Advanced Driver Assistance Systems (ADAS) a valid virtual development environment is crucial for functionality and reliability.
Efficient methodologies for the development and validation of highly-automated vehicle systems play an increasingly important role in urban mobility. In addition, the requirements for simulation and verification environments are highly increasing due to a wide range of automation functions to be integrated and validated in the near future.
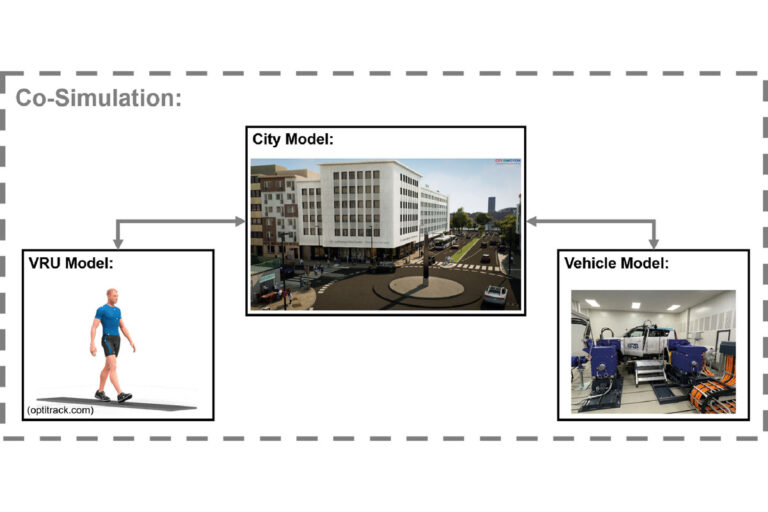
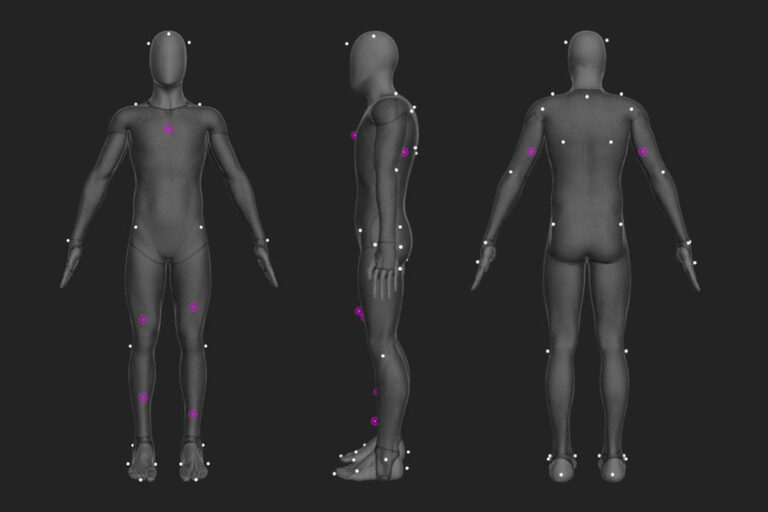
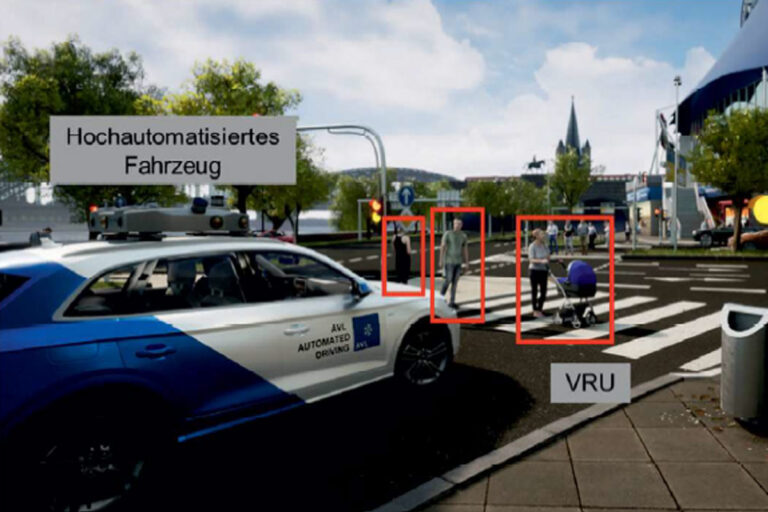
Recently, virtual realities and simulations play important roles in the development of automated driving functionalities. By an appropriate abstraction, they help to design, investigate and communicate real traffic scenario complexity. Especially, for edge cases investigations of interactions between vulnerable road users (VRU) and highly automated driving functions, valid virtual models are essential for the quality of results.
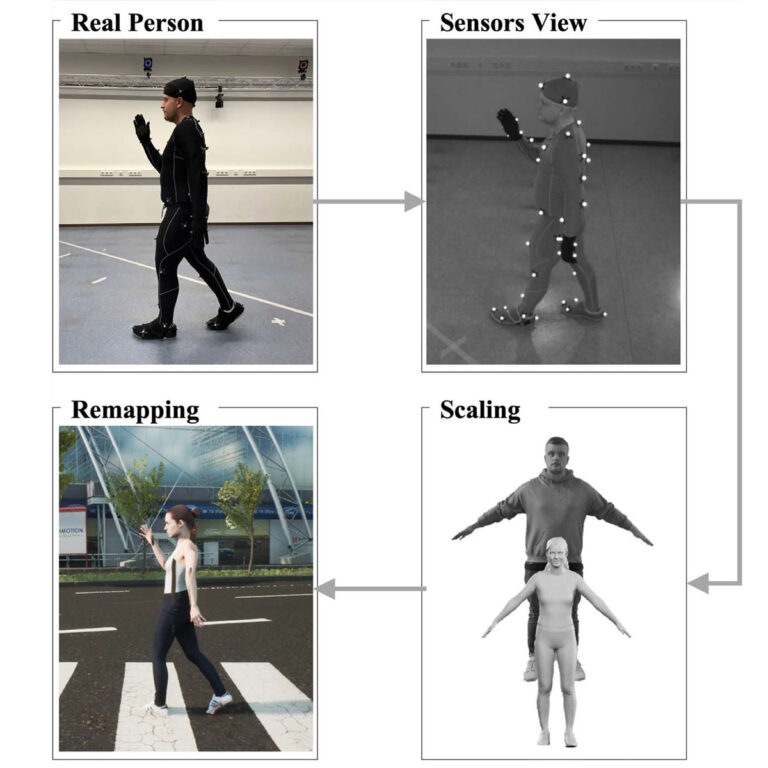
Human road users are the most vulnerable participants in urban traffic. This is due on the one hand to their spatial proximity to other road users, and on the other hand to the individuality of their behavior and decision-making processes. For this reason, they play a crucial key role for the development of highly automated vehicle systems – especially for urban environments.
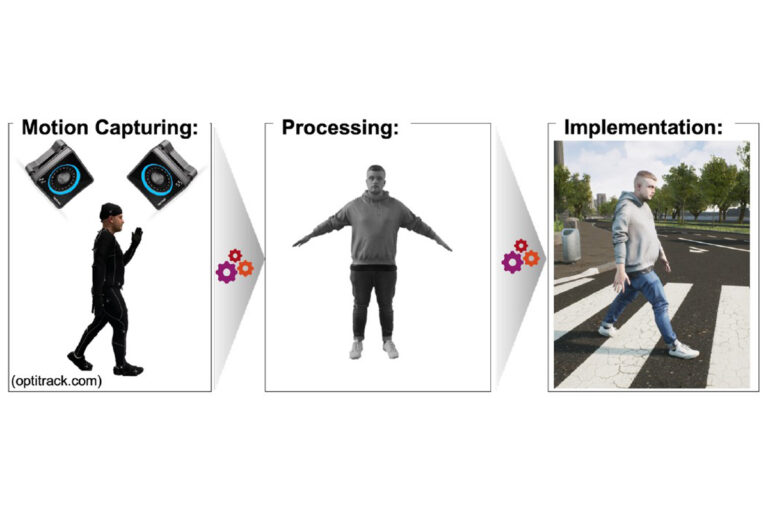
Efficient simulation environments for the development, calibration and approval of highly automated vehicle systems are regarded as a decisive key to accelerating technological progress in this field. Especially urban environments with their high diversification of requirements pose a particular challenge.

The need to find alternative urban mobility solutions for delivery and transport has led mobility companies to devote enormous resources for researchbased solutions to increase vehicle safety. This paper documents a virtual approach to investigate the influences of different load states to the vehicle dynamic of light electric vehicle.
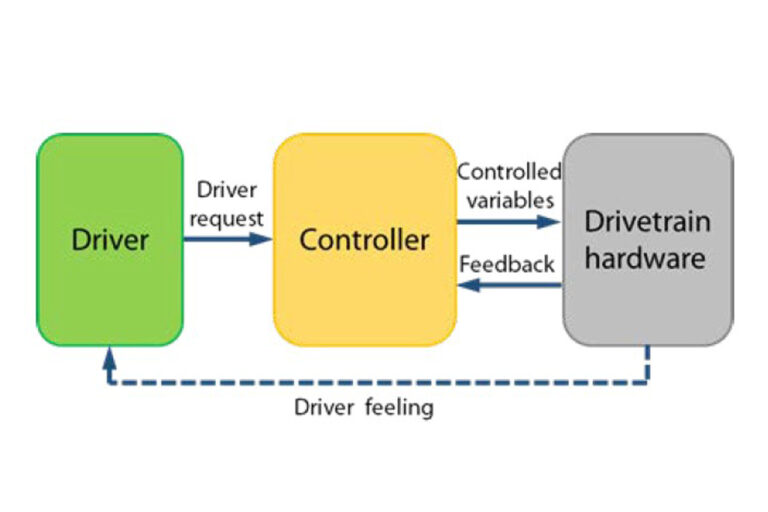
Model based engineering is especially for the development of high performing control systems essentially. By means of suitable simplifications, they help to present technical relationships and express them mathematically. Thereby, active controllers to influence the system behavior could be developed in an efficient and reliable way.

Electric bicycles and cargo bikes have become an indispensable part of today´s road traffic. This is caused by high diversity of applications and available products. Due to the growing interest, the demand of driver assistance systems (DAS) and safety concepts for light electric vehicles is increasing.
The backscattering models of complex traffic targets play a critical role in the current evolvement of over-the-air (OTA) validation test methods and, consequently, the validation and verification of advanced driver assistance systems (ADAS). Furthermore, stimulating the operational behavior of the automotive radar sensor in an OTA vehicle-in-the-loop (ViL) environment requires radar cross section (RCS) and Doppler signatures related to the movement of vulnerable road users (VRUs), especially pedestrians in traffic scenarios.
Effiziente Methoden für die Entwicklung und Validierung von hochautomatisierten Fahrzeugsystemen spielen in der Mobilitätsindustrie eine immer wichtigere Rolle. Insbesondere die Einführung innovativer Assistenz- und Automatisierungsfunktionen erfordern neue Methoden in der Simulations- und Prüfstandstechnik.